道路匹配(也有称之为Location)是GPS导航系统中一个的关键性模块。由于各种不可预知的因素,GPS接收信号存在不规则误差,由此产生的结果是,如果车子行驶在某条道路,接收到GPS经纬度不规则得分布于道路的两侧,同时地图的角度也可能会瞬间出现180°水平翻转。
“怎样才能够克服误差把GPS经纬度,映射到当前行驶中道路上的正确位置,并且得到一个合理前行的角度?”就是道路匹配要应对的命题。
在水平垂直牵引,是我接触过用的比较多处理方法。它的思想是选择当前经纬度附近一定范围的道路,作为目标道路,将每条道路分解成多个线段,计算出经纬度到每一线段上垂直交叉点。当垂直交叉点位于线段内,并且角度没有出现瞬间大范围变化时,认定垂直线距离最短的道路为当前行驶的道路,垂直交叉点为当前经纬度所在点。
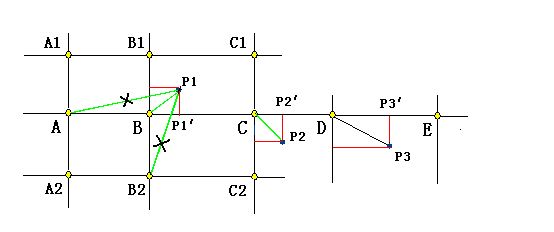
图中所有道路都是当前候选路段,特别标注了水平方向的道路,做了部分垂直牵引的示意线(汽车实际行驶方向A→E,红线代表垂直牵向量、绿线代表出发点到GPS经纬度的向量)
以P1点为例,尝试牵引到AB、B2B失败,因为垂直牵引点不落在线段端点内,在BB1、BC的牵引结果是有效的,如果到BC的距离最小,在理想情况下,就可以认定当前道路段是BC、当前点为P1'。
由此,引出第一个原则:尊重GPS的经纬度,即使有误差的场合,也是与真实位置靠近的。
但在实际使用中,仅凭距离最短距离就断定当前道路是BC,是存在风险的。如果当P1点更靠近BB1、B2C2的时候,就可能得出与当前行驶道路不吻合的结果。此时,就需要通过,检测角度的变化、以及优先匹配当前行驶中道路等手段来提高匹配结果的正确性。
通过上面的描述,还可以发现,在道路的交叉出,将会出现复杂的取舍。但是垂直牵引,作为最基础的思想,这是不会改变。再啰嗦一下它的三点要素,结束本小节:
一、选取比较目标路段
二、垂直交叉点落在线段内
三、垂直距离最小
分享到:




相关推荐
毕业设计——履带牵引车辆转向机构的设计.rar
毕业设计——履带牵引车辆变速器改进设计.rar
具有量子行为粒子群算法——在牵引供电系统补偿计算中的应用.pdf
地铁车辆——牵引培训.ppt
机械毕业设计,包含论文和DWG图纸
铁路运输专业必备 牵引计算 pdf电子书
行业分析——牵引链市场现状及未来发展趋势
毕业设计——橡胶履带牵引车辆改进设计(高速行走机构).rar
毕业设计——橡胶履带牵引车辆高速行走机构设计(由cad原图).rar
毕业设计——橡胶履带牵引车辆改进设计(无极自动变速器方案设计).rar
毕业设计——橡胶履带牵引车辆改进设计(机械双功率流转向装置).rar
电子政务-电梯钢丝绳垂直牵引器.zip
采煤机行走技术从钢丝绳、圆环链的柔性牵引,发展到液压驱动和电机驱动的自行走,改变了采煤机自动化控制模式,也奠定了智能化采煤作业的技术基础。基于采煤机牵引技术构成要素,从理论上归纳了112种采煤机行走技术...
首先建立电牵引采煤机牵引部不牵引故障树,对故障树中基本事件的故障程度进行等级划分;然后采用模糊综合评判方法计算每个基本事件隶属于相应故障等级的隶属度,得出牵引部在各工作阶段的故障形式及故障率,从而实现对电...
介绍列车牵引计算方法的规程和一些常数的选取,计算方法。
Matlab地铁牵引供电系统建模与仿真 Matlab地铁牵引供电系统建模与仿真 Matlab地铁牵引供电系统建模与仿真 Matlab地铁牵引供电系统建模与仿真 Matlab地铁牵引供电系统建模与仿真 Matlab地铁牵引供电系统建模与仿真 ...
电传动履带战斗车辆牵引电机的额定转速匹配方法,陈泽宇,张承宁,结合战斗车辆的使用特点和电机的牵引特性,分析了电机额定转速点的设计对整车性能的影响因素,提出了牵引电机的额定转速点的方法
牵引供电系统对公共电网的影响 附上matlab仿真模型
中国城市轨道交通协会于2018年4月发布了城市轨道交通电动客车牵引系统系列标准《城市轨道交通电动客车牵引系统 第1部分:牵引逆变器技术规范》(T/CAMET 04002.1—2018)、《城市轨道交通电动客车牵引系统 第2部分:...
把握市场牵引契机 推进产业跨越发展——2015年中国半导体市场年会暨第四届集成电路产业创新大会.pdf