¬†¬† ¬†еЬ®йБУиЈѓеМєйЕНдЄ≠пЉМдЇ§еПЙиЈѓеП£зЪДеМєйЕНжШѓжЬАе§НжЭВзЪДгАВеЄЄиІБзЪДйЧЃйҐШжЬЙдЄЙзІНпЉМдЄАжШѓеЬ®йФЩиѓѓзЪДйБУиЈѓи°Мй©ґдЄАе∞ПжЃµиЈЭз¶їеРОпЉМжЙНиЈ≥еИ∞ж≠£з°ЃзЪДиЈѓдЄКпЉЫдЇМжШѓдљНзљЃжЫіжЦ∞姙жЕҐпЉМзДґеРОз™БзДґиЈ≥еК®пЉЫдЄЙжШѓиІТеЇ¶еПНж؆姙жЕҐгАВ
¬†¬† ¬† ¬† ¬†еМєйЕНйФЩиѓѓзЪДеОЯеЫ†жЬЙдЄЙзІНпЉМдЄАгАБдЉШеЕИеМєйЕНеОЯжЭ•йБУиЈѓжЧґпЉМеРСеЙНи°Мй©ґдЇЖдЄАжЃµиЈЭз¶їгАВдЇМгАБдї•дЇ§еПЙиЈѓеП£дЄЇдЄ≠ењГеИТеЃЪдЄАдЄ™иМГеЫіпЉМеЬ®ж≠§иМГеЫіеЖЕдЄНеБЪжЫіжЦ∞гАВдЄЙгАБзО∞еЃЮдЄ≠дЇ§еПЙиЈѓеП£еТМжХ∞жНЃдЄ≠зЪДйБУиЈѓж®°еЮЛжЬЙеЈЃеЉВпЉИжѓФе¶ВпЉМдЇ§еПЙиЈѓеП£дЉЪжЬЙдЄАдЇЫиЩЪжЛЯзЪДйБУиЈѓпЉЙгАВеЫЫгАБGPSзЪДиѓѓеЈЃгАВ
¬†¬† ¬† ¬† ¬†дљНзљЃжЫіжЦ∞жЕҐзЪДеОЯеЫ†жЬЙдЄ§дЄ™пЉЪдЄАжШѓеЬ®дЇ§еПЙиЈѓеП£зЪДи°Миµ∞иљ®ињєеТМжХ∞жНЃдЄ≠зЪДйБУиЈѓж®°еЮЛдЄНеЃМеЕ®зЫЄеРМпЉМеЬ®жХ∞жНЃдЄ≠пЉМдЄ§жЭ°иЈѓжШѓењЕдЇ§еПЙдЇОдЄАзВєпЉМиАМеЃЮйЩЕдЄКеЬ®дЇ§еПЙзВєдєЛеЙНе∞±еЈ≤зїПеЉАеІЛжЛРеЉѓпЉМжЛРеЉѓдЄНдЄАеЃЪзїПињЗдЇ§еПЙзВєгАВеЬ®ж≤°жЬЙеЃМеЕ®еИ∞иЊЊжЦ∞иЈѓдєЛеЙНпЉМеЭЗжЬЙеПѓиГљеЬ®дЇ§еПЙзВєеЙНзЪДиЈѓжЃµдЄКгАВдЇМжШѓдЄЇдЇЖеЫЮйБњеМєйЕНйФЩиѓѓпЉМиАМйЗЗеПЦзЪДеїґињЯз≠ЦзХ•гАВ
¬†¬† ¬† ¬† ¬†иІТеЇ¶жШѓеИ©зФ®еЙНеРОзВєзїПзЇђеЇ¶иЃ°зЃЧеЗЇжЭ•зЪДпЉМиІТеЇ¶жЫіжЦ∞жЕҐзЪДеОЯеЫ†пЉМдЄАжШѓдљНзљЃжЫіжЦ∞жЕҐгАВеѓЉиЗіеПШеМЦжЕҐпЉМдЇМжШѓиІТеЇ¶йЗЗеПЦдЇЖжКШдЄ≠з≠ЦзХ•пЉМеѓЉиЗіеПШеМЦе∞ПгАВ
¬†¬† ¬† ¬† ¬†еЬ®жИСдїђзЪДеЉАеПСињЗз®ЛдЄ≠пЉМе∞ЭиѓХињЗе§ЪзІНжХ∞е≠¶жЦєж≥ХжЭ•еЫЮйБњињЩдЇЫйЧЃйҐШпЉМе¶Ви∞ГжХіеМєйЕНзЪДиѓѓеЈЃиМГеЫіпЉЫеҐЮеК†еѓєйБУиЈѓжХ∞жНЃдЄ≠йАЪи°Ме±ЮжАІзЪДеИ©зФ®пЉЫеѓєеЇФдЇ§еПЙиЈѓеП£ињЫи°МиМГеЫійЩРеИґз≠Йз≠ЙпЉМжЬАзїИжХИжЮЬйГљдЄНзФЪзРЖжГ≥гАВжЫЊзїПжЬЙйГ®еИЖеОВеХЖпЉМеЬ®ж±љиљ¶зЪДиљіжЙњдЄКеЃЙи£ЕиљђеЉѓгАБеАЊжЦЬдЉ†жДЯеЩ®пЉМеєґйЕНеРИйБУиЈѓзљСжХ∞жНЃеТМеАЊжЦЬжХ∞жНЃпЉМдї•жПРйЂШеМєйЕНзЪДеЗЖеЇ¶гАВ
¬†¬† ¬† ¬† ¬†зФ®дЇОжЙЛжЬЇгАБPNDзЪДеѓЉиИ™з≥їзїЯдЄ≠пЉМжЬЙдїАдєИдљОжИРжЬђзЪДжЦєеЉПпЉМе§Іе§ІжПРйЂШжЛРеЉѓжЧґзЪДеЗЖеЇ¶еРЧпЉЯ
¬†¬† ¬† ¬† ¬†з≠Фж°ИжШѓпЉМеИ©зФ®е•љGPSз©њињЗжЭ•зЪДиІТеЇ¶еТМйАЯеЇ¶гАВеЬ®йАЯеЇ¶дЄНжШѓињЗдљОжЧґпЉМдїОGPSдЉ†ињЗжЭ•зЪДеАЉжШѓжѓФиЊГз®≥еЃЪзЪДпЉМеПѓдњ°еЇ¶жШѓеЊИйЂШзЪДгАВ
¬†¬† ¬† ¬† ¬†е¶ВжЮЬиГље§Яз°ЃеЃЪеЙНжЦєиЈѓеП£пЉМеєґдЄФеЬ®ињЫеЕ•еЙНжЦєиЈѓеП£дєЛеЙНпЉМе∞ЖеПѓиГљйАЪи°МзЪДйБУиЈѓйГљжЙЊеЗЇжЭ•пЉМеЬ®иЈЭз¶їеЙНжЦєдЇ§еПЙиЈѓеП£дЄАеЃЪиЈЭз¶їзЪДеЬ∞жЦєпЉМжФЊеЉГдї•еЮВзЫізЙµеЉХиЈЭз¶їдЉШеЕИзЃЧж≥ХзЪДеМєйЕНпЉМжФєдЄЇеИ©зФ®GPSиІТеЇ¶еТМйАЯеЇ¶еПШеМЦиґЛеКњжЭ•ињЫи°МйБУиЈѓеМєйЕНгАВ
¬†¬† ¬† ¬† ¬†жЬЙдЄАзїДеЃЮй™МжХ∞жНЃпЉМе¶ВжЮЬдї•25еЕђйЗМ/жЧґзЪДйАЯеЇ¶пЉМжЛРдЄАдЄ™90еЇ¶зЪДеЉѓпЉМдЉЪжО•еИ∞еЫЫжђ°жШОжШЊзЪДиІТеЇ¶еПШеМЦгАВе¶ВжЮЬйАЯеЇ¶жПРйЂШеИ∞45еЕђйЗМ/жЧґпЉМжО•еИ∞зЪДиІТеЇ¶жЫіжЦ∞жђ°жХ∞жШѓ3жђ°гАВ
¬†¬† ¬† ¬† ¬†йВ£дєИпЉМе¶ВжЮЬжИСдїђеЬ®зђђдЄАжђ°иІТеЇ¶еПСзФЯжШОжШЊжФєеПШжЧґпЉМеИ©зФ®иІТеЇ¶жЙАеЬ®зЪДи±°йЩРпЉМжОТйЩ§дЄАдЇЫдЄНзђ¶еРИжЭ°дїґзЪДеАЩйАЙйБУиЈѓпЉМеРМжЧґињФеЫЮGPSиІТеЇ¶пЉМе∞ЖзїПзЇђеЇ¶жЫіжЦ∞еИ∞дЇ§еПЙзВєдЄКгАВзДґеРОеИ©зФ®дЄЛдЄАжђ°пЉМжИЦдЄЛдЄЛжђ°зЪДGPSиІТеЇ¶пЉМињЫдЄАж≠•жШОз°ЃзЫЃж†ЗйБУиЈѓгАВе¶ВжЮЬдЇ§еПЙиЈѓеП£еЊИе§НжЭВзЪДжЧґеАЩпЉМеПѓдї•з≠ЙеИ∞иІТеЇ¶дЄНеЖНеПСзФЯжШОжШЊеПШеМЦжЧґпЉМеЖНз°ЃеЃЪжЬАзїИзЪДйБУиЈѓгАВ
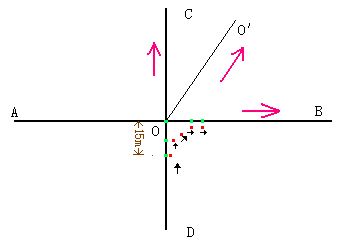       
      
¬†¬† ¬† ¬† ¬†е¶ВдЄКеЫЊдЄ≠пЉМж±љиљ¶дїОDвАФ>OвАФ>Bи°Мй©ґпЉМеЄ¶жЦєеРСзЪДзЇҐиЙ≤зВєжШѓGPSж®°еЭЧеЊЧеИ∞иљ®ињєзВєпЉМеЬ®иЈЭз¶їOзВєињШжЬЙ15mзЪДжЧґеАЩпЉМе∞±йЗЗзФ®дЇ§еПЙзВєзЙєжЃКеМєйЕНзЃЧж≥ХгАВе∞ЖеЙНжЦєеПѓйАЪи°МзЪДйБУиЈѓдљЬдЄЇеАЩйАЙйБУиЈѓпЉМиІТеЇ¶ж≤°жЬЙеПСзФЯжШОжШЊеПШеМЦзЪДжЧґеАЩпЉМе∞±дЉШеЕИеМєйЕНеИ∞еОЯиЈѓжЃµдЄКпЉМељУзђђдЄАжђ°иІТеЇ¶еПСзФЯжШОжШЊеПШеМЦжЧґпЉМе∞ЖзВєеМєйЕНеИ∞OзВєдЄКпЉМеРМжЧґдљњзФ®GPSеЊЧеИ∞зЪДиІТеЇ¶пЉМж†єжНЃж≠§иІТеЇ¶еПѓе∞ЖOCгАБOOпЉЗиЈѓжЃµжОТйЩ§дЇЖгАВељУзђђдЇМжђ°иІТеЇ¶еПСзФЯжШОжШЊеПШеМЦжЧґпЉМе∞±еПѓдї•з°ЃеЃЪOBдЄЇдЄЛдЄАдЄ™е∞Жи¶Би°Миµ∞зЪДиЈѓжЃµгАВ
¬†¬† ¬† ¬† иАГиЩСеИ∞жЛРеЉѓе§ДпЉМйАЯеЇ¶дЉЪдЄАиИђдЉЪжЬЙжШОжШЊеПШеМЦпЉМеЫ†ж≠§еПѓдї•дљЬдЄЇжЛРеЉѓеИ§жЦ≠дЄАдЄ™жЭГеАЉиЊГдљОзЪДеИ§еЃЪеЫ†зі†гАВ
еИЖдЇЂеИ∞пЉЪ





зЫЄеЕ≥жО®иНР
дЄАзІНзЯҐйЗПйБУиЈѓеЫЊе±ВиКВзВєеМєйЕНжЦ∞зЃЧж≥ХпЉМе≠Щж££еНОпЉМжѓХдњКжЭ∞пЉМйТИеѓєзЯҐйЗПйБУиЈѓеЫЊе±ВеЬ®зФЯжИРињЗз®ЛдЄ≠е≠ШеЬ®зЪДињЗе§ігАБдЄНеПКдї•еПКдЇ§еПЙеП£еИЖз¶їз≠ЙеЕЄеЮЛзЪДдЄНиІДиМГжГЕеЖµпЉМжПРеЗЇйЗЗзФ®иЈЭз¶їжЬАињСеОЯеИЩз°ЃеЃЪдЄОйБУиЈѓдЇ§еПЙеП£зЫЄињЮжО•
йБУиЈѓдЇ§еПЙеП£жШѓйБУиЈѓзљСзЪДйЗНи¶БзїДжИРйГ®еИЖ,еѓєGISжХ∞жНЃжЫіжЦ∞гАБељ±еГПеМєйЕНгАБзЫЃж†Зж£АжµЛз≠ЙеЕЈжЬЙйЗНи¶БдљЬзФ®гАВзФ±дЇОеПЧеРДзІНеє≤жЙ∞дї•еПКйБУиЈѓдЄОеС®еЫіеЬ∞зЙ©еѓєжѓФеЇ¶дЄНжШОжШЊз≠Йељ±еУН,дЉ†зїЯйБУиЈѓдЇ§еПЙеП£ж£АжµЛжЦєж≥ХеЊИйЪЊеЇФзФ®дЇОйЂШеИЖиЊ®зОЗSARеЫЊеГПгАВиѓ•жЦЗжПРеЗЇдЄАзІНзЫіжО•...
еЬ∞еЫЊеМєйЕНзЃЧж≥ХзЪДжЬЙжХИжАІеТМеПѓйЭ†жАІеѓєдЇОжЩЇиГљдЇ§йАЪз≥їзїЯиАМи®АжШѓйЭЮеЄЄйЗНи¶БзЪДпЉМиАМзЫЃеЙНе≠ШеЬ®зЪДеЬ∞еЫЊеМєйЕНзЃЧж≥ХеЬ®дЄАдЇЫе§НжЭВзОѓеҐГдЄЛпЉИе¶ВйБУиЈѓдЇ§еПЙеП£пЉЙдїНзДґдЄНиГљжПРдЊЫеРИзРЖзЪДиЊУеЗЇгАВйЗЗзФ®D-SиѓБжНЃзРЖиЃЇиЮНеРИељУеЙНиљ¶иЊЖдљНзљЃдњ°жБѓеТМжЦєеРСдњ°жБѓеПѓдї•жЬЙжХИеЬ∞...
еЬ∞еЫЊеМєйЕНзЃЧж≥ХзЪДжЬЙжХИжАІеТМеПѓйЭ†жАІеѓєдЇОжЩЇиГљдЇ§йАЪз≥їзїЯиАМи®АжШѓйЭЮеЄЄйЗНи¶БзЪД,иАМзЫЃеЙНе≠ШеЬ®зЪДеЬ∞еЫЊеМєйЕНзЃЧж≥ХеЬ®дЄАдЇЫе§НжЭВзОѓеҐГдЄЛ(е¶ВйБУиЈѓдЇ§еПЙеП£)дїНзДґдЄНиГљжПРдЊЫеРИзРЖзЪДиЊУеЗЇгАВйЗЗзФ®D-SиѓБжНЃзРЖиЃЇиЮНеРИељУеЙНиљ¶иЊЖдљНзљЃдњ°жБѓеТМжЦєеРСдњ°жБѓеПѓдї•жЬЙжХИеЬ∞жЙ©е§ІеЊЕ...
дЄЇдЇЖеЬ®ж®°ж£±дЄ§еПѓзЪДжГЕеЖµдЄЛпЉИдЊЛе¶ВпЉМйБУиЈѓдЇ§еПЙеП£еТМеє≥и°МиЈѓеЊДпЉЙжПРдЊЫеЗЖз°ЃзЪДеМєйЕНзїУжЮЬпЉМжИСдїђињЫдЄАж≠•еїЇиЃЃдљњзФ®Passby *гАВеЃГеЯЇдЇОе§ЪйЗНеБЗиЃЊжКАжЬѓпЉМиЃЊж≥ХзїіжК§дЇЖдЄАе∞ПйГ®еИЖдљЖеЃМжХізЪДеПѓиГљиІ£еЖ≥жЦєж°ИпЉМеєґжЬАзїИйАЙжЛ©дЇЖеПѓиГљжАІжЬАйЂШзЪДиІ£еЖ≥жЦєж°ИгАВеЬ®зЬЯеЃЮ...
йА†жИРдЇ§йАЪжЛ•жМ§еЊАеЊАз™БеЗЇи°®зО∞еЬ®йБУиЈѓзЪДдЇ§еПЙеП£е§ДпЉМеЬ®зїЉеРИдЇЖж®°з≥КжОІеИґжКАжЬѓеТМеЯОеЄВдњ°еПЈдЇ§еПЙеП£дЇ§йАЪдњ°еПЈжОІеИґжКАжЬѓеЯЇз°АдЄКпЉМйТИеѓєе§ЪиЈѓеП£дЇ§йАЪжОІеИґзЪДзЙєеЊБеПКеЃЮйЩЕдЇ§йАЪзКґеЖµпЉМеѓєеЈ≤жЬЙж®°з≥КжОІеИґзЃЧж≥ХињЫи°МдЇЖжФєињЫпЉМеЬ®еНХиЈѓеП£ж®°з≥КжОІеИґз†Фз©ґзЪДеЯЇз°АдЄК...
зФ±дЇОжµЃеК®иљ¶жХ∞жНЃйЗЗйЫЖдЄ≠е≠ШеЬ®GPSжХ∞жНЃеС®жЬЯињЗйХњгАБжЛУжЙСеЕ≥иБФ...еЃЮйЩЕжХ∞жНЃй™МиѓБи°®жШО,иѓ•зЃЧж≥ХеЬ®дњЭиѓБжХ∞жНЃеЃМжХіжАІеТМжЬЙжХИжАІзЪДеЯЇз°АдЄК,еПѓдї•еЃЮжЧґгАБеЗЖз°ЃеЬ∞ињЫи°МеЬ∞еЫЊеМєйЕН,е∞§еЕґжШѓиљ¶иЊЖдљНдЇОе§НжЭВдЇ§еПЙеП£еПКйЂШжЮґж°•йЩДињСеМЇеЯЯжЧґиљ¶иЊЖзЬЯеЃЮи°Мй©ґйБУиЈѓзЪДз°ЃеЃЪ.
ж†єжНЃеМєйЕНзЪДйБУиЈѓйЕНзљЃпЉМзЕІжШОжГЕеЖµпЉМињЫзЂЩзЇњйЪЖйЪЖеЄ¶пЉМињЫеЬЇжХ∞йЗПпЉМйАЪйБУеМЦпЉМдЇ§йАЪйЗПеТМжО•ињСз®ЛеЇ¶пЉМдЄЇжѓПдЄ™е§ДзРЖдЇ§еПЙеП£жЙЛеК®йАЙжЛ©дЄАдЄ™жИЦе§ЪдЄ™жОІеИґдљНзљЃгАВ еАЊеРСеЊЧеИЖдЉ∞иЃ°дЄЇдЄО40дЄ™еѓєзЕІдљНзљЃеМєйЕНдї•ињЫи°МжѓФиЊГгАВ еїЇзЂЛдЇЖйТИеѓєе§ЬйЧіеТМзٚ姩дЄНеРМдЉ§еЃ≥...
йТИеѓєйЂШйАЯеЕђиЈѓеЕ•еП£еМЭйБУеРИжµБе§ДжШУ...еЃЮй™МиѓБжШОжПРеЗЇзЪДжЦєж≥ХеПѓжЬЙжХИеЬ∞иІ£еЖ≥дЉ†зїЯж±љиљ¶еЃЙеЕ®иЊЕеК©й©Њй©ґз≥їзїЯдЄ≠еРДз±їдЉ†жДЯеٮ姱жХИиАМйА†жИРзЪДйЧЃйҐШпЉМеєґеПѓеЇФзФ®дЇОжЮБзЂѓзЪДж∞ФеАЩжЭ°дїґгАБзЙєжЃКзЪДиЈѓеЖµеМЕжЛђдЇ§еПЙиЈѓеП£з≠Йе§НжЭВйБУиЈѓдЄЛзЪДеЃЙеЕ®иЊЕеК©й©Њй©ґз≠ЙеРДз±їз≥їзїЯгАВ
жЬђжЦЗдї•ељ±еГПдЄОзЯҐйЗПжХ∞жНЃдЄ≠йБУиЈѓи¶Бзі†зЪДеЗ†дљХдљНзљЃеЈЃеЉВе§ДзРЖдЄЇдЊЛпЉМеЬ®иѓЖеИЂзЯҐйЗПжХ∞жНЃжОІеИґзВєзЪДеЯЇз°АдЄКпЉМеИ©зФ®ељТдЄАеМЦзЫЄеЕ≥з≥їжХ∞еМєйЕНиѓЖеИЂељ±еГПдЄ≠зЪДйБУиЈѓдЇ§еПЙеП£пЉМеєґе∞ЖеЕґдљЬдЄЇжОІеИґзВєпЉЫеИЖеИЂеЬ®ељ±еГПеТМзЯҐйЗПжХ∞жНЃдЄ≠еїЇзЂЛDelaunayдЄЙиІТзљСпЉМеЯЇдЇОеРМеРНзВє...
жФєйА†еЈ•з®ЛиЃЊиЃ° жЬ™дЄ≠ж†З 3 еНЧеЕЕ 2020-06-23 еЫЫеЈЭзКНдЄЇиК≠зЯ≥зЛђзЂЛеЈ•зЯњеМЇжЦ∞еЮЛеЈ•дЄЪеЯЇеЬ∞е≠ЭеІСж†ЄењГеМЇ"дЄАзЇµдЄ§ж®™" йБУиЈѓеПКйЕНе•ЧзЃ°зљСеЈ•з®ЛеЛШеѓЯиЃЊиЃ° дЄ≠ж†З 4 йЗНеЇЖ 2020-06-19 姩жЦЗе§ІйБУдЄОж∞ідЇСиЈѓдЇ§еПЙеП£дЇЇи°МињЗи°ЧиЃЊжЦљеЈ•з®ЛеЛШеѓЯиЃЊиЃ° жЬ™дЄ≠ж†З 5 ...
зФ±дЇОеЬ∞зРЖи¶Бзі†еЬ®дЄНеРМе∞ЇеЇ¶дЄЛзЪДжКљи±°и°®иЊЊеЊАеЊАи°®зО∞еЗЇдЄНеРМзЪДз©Їй׳嚥жАБгАБзїУжЮДеТМзїЖиКВпЉМе¶ВдљХж†єжНЃеЬ∞зРЖи¶Бзі†еЬ®дЄНеРМ...еєґдї•е§Ъе∞ЇеЇ¶йБУиЈѓзљСжХ∞жНЃеЇУдЄ≠йБУиЈѓдЇ§еПЙеП£и¶Бзі†е§Ъе∞ЇеЇ¶и°®иЊЊдЄЇдЊЛпЉМиѓ¶зїЖеЙЦжЮРдЇЖиѓ•з≠ЦзХ•зЪДеЃЮзО∞ињЗз®ЛгАВиѓХй™МзїУжЮЬй™МиѓБдЇЖиѓ•жЦєж°ИзЪД
110еЯЇдЇОжДЯзЯ•жХ∞жНЃеЬ®дЇ§еПЙеП£иЗ™дЄїй©Њй©ґ.pdf 111еЯЇдЇОзЫЃж†ЗзЪДйҐДеСКзЙЗе§ЗдїљеЖ≤з™БзЉУиІ£.pdf 112и†ХеК®иЊЕеК©иљђеРСзЃ°зРЖ.pdf 113иЗ™еК®иљ¶иЊЖеБЬжФЊеТМињЗжЄ°еИ∞жЙЛеК®жОІеИґ.pdf 114ж±љиљ¶жЧ†дЇЇжЬЇйГ®зљ≤з≥їзїЯ.pdf 115еҐЮеЉЇиљђеРСжУНдљЬ.pdf 116зФ®дЇОиЗ™еК®ж£АжµЛеТМеУНеЇФ...
дЇ§йАЪдњ°еПЈзБѓзФ®дЇОйБУиЈѓеє≥йЭҐдЇ§еПЙиЈѓеП£пЉМйАЪињЗеѓєиљ¶иЊЖгАБи°МдЇЇеПСеЗЇи°МињЫжИЦеБЬж≠ҐзЪДжМЗдї§пЉМдљњдЇЇдЄОдЇЇгАБиљ¶дЄОиљ¶дєЛйЧіе∞љеПѓиГљеЗПе∞СзЫЄдЇТеє≤жЙ∞пЉМдїОиАМжПРйЂШиЈѓеП£зЪДйАЪи°МиГљеКЫпЉМдњЭйЪЬиЈѓеП£зХЕйАЪеТМеЃЙеЕ®гАВжЬђжЦЗдїЛзїНдЇЖдЄАзІНеЯОеЄВеНБе≠ЧиЈѓеП£дЇ§йАЪдњ°еПЈзБѓжОІеИґз≥їзїЯгАВ...
еНПеРМжУНжОІпЉИеЬ®еПШйБУгАБжОТйШЯгАБдЇ§еПЙеП£жОІеИґз≠ЙжЦєйЭҐеНПи∞Гиљ¶иЊЖи°Мй©ґиЈѓзЇњпЉЙпЉЫйАЪзЯ•еЉ±еКњйБУиЈѓдљњзФ®иАЕпЉМеН≥и°МдЇЇгАБй™СиЗ™и°Миљ¶иАЕз≠ЙпЉЫдЇ§йАЪињРиЊУжХИзОЗпЉИеК®жАБжЫіжЦ∞иЈѓзЇњгАБеЬ∞еЫЊз≠ЙпЉЙдЄЇдЇЖжФѓжМБињЩдЇЫзФ®дЊЛпЉМеПѓиГљйЬАи¶БдЄАзІНдї•дЄКзЪДжЧ†зЇњжКАжЬѓпЉМдЊЛе¶ВпЉМиЃЊе§ЗдєЛйЧізЪД...
иІЖйҐСзЫСжОІз≥їзїЯдЄїи¶БиЃЊзљЃдЇОеЇХе±ВдЄїи¶БеЕ•еП£пЉМе¶ВеЕђеЕ±еЬЇжЙАгАБйЗНи¶БжИњйЧігАБж•Ље±ВзԵ楃йАЪйБУгАБзԵ楃蚜еОҐгАБеЃ§е§ЦдЄїеє≤йБУиЈѓеПКдЇ§еПЙеП£з≠Йе§ДгАВ йШ≤зЫЧжК•и≠¶з≥їзїЯдЄїи¶БиЃЊзљЃдЇО賥еК°гАБж°£ж°Из≠ЙйЗНи¶БжИњйЧігАВйГ®еИЖеЬЇжЙАиЃЊзљЃжЙЛеК®жК•и≠¶жМЙйТЃгАВ йЧ®з¶Бз≥їзїЯиЃЊзљЃдЇОйЗНи¶Б...
58дЇ§еПЙеП£еЉХеѓЉжЦєж≥ХпЉМеѓЉиИ™жЬНеК°еЩ®пЉМеѓЉиИ™зїИзЂѓдї•еПКеМЕжЛђиѓ•жЦєж≥ХзЪДеѓЉиИ™з≥їзїЯ.pdf 59иЗ™еК®й©Њй©ґиљ¶иЊЖзЪДи°Мй©ґиЈѓеЊДиІДеИТи£ЕзљЃеТМжЦєж≥Х.pdf 5иљ¶иЊЖеПКеЕґжОІеИґжЦєж≥Х.pdf 60зФ®дЇОжОІеИґиЗ™дЄїеѓЉиИ™зЪДи£ЕзљЃеТМжЦєж≥Х.pdf 61дЇІзФЯиљ¶иЊЖи°Мй©ґиЈѓзЇњзЪДи£ЕзљЃеТМжЦєж≥Х....